车辆检测
车辆检测案例是对输入视频进行解码,对每一帧图片进行车辆检测,将结果渲染成视频。
功能
输入本地视频文件,识别画面中的车辆,识别结果保存到本地。
模型准备
AI应用开发前需要准备好匹配当前ModelBox版本支持的推理框架和版本的模型文件,这里已经准备好车辆检测torch模型文件。
AI应用开发
首先准备开发环境,然后进入应用开发环节,主要分为流程图编排、功能单元编写、运行与调试、打包部署4个开发步骤。
环境准备
环境准备工作可以参考环境准备,区别是需要选择libtorch镜像:
docker pull modelbox/modelbox-develop-libtorch_1.9.1-cuda_10.2-ubuntu-x86_64:latest
项目创建与运行
可参考创建项目,最后可选择创建car_detection项目工程。
本案例是测试本地视频文件,可以测试视频路径可以在video_input节点中设置,结果视频路径在videoencoder节点中设置。
流程图开发
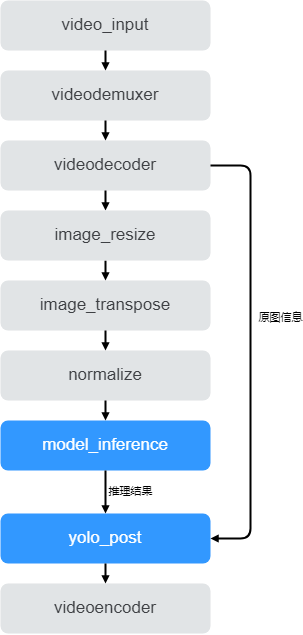
如上图所示,整个流程图分为5个阶段:视频输入/解码、车辆检测预处理、车辆检测推理、车辆检测后处理、视频编码。
视频输入/解码:video_input功能单元用作输入视频配置,后面接视频的解封装、解码功能单元(videodemuxer、videodecoder)得到视频帧;
车辆检测预处理:对视频帧进行预处理(reisze、transpose、normalize);
车辆检测推理:将预处理后的数据交给模型推理(model_inference);
车辆检测后处理:推理后进行后处理,并画出检测框渲染到图像上(yolo_post);
视频编码:最后将渲染结果图编码成视频文件(videoencoder);
整个流程只需要实现蓝色部分功能单元,其他功能单元都在ModelBox中内置,只需修改配置即可使用。具体toml配置文件如下所示:
[graph]
format = "graphviz"
graphconf = """digraph car_detection {
node [shape=Mrecord]
video_input[type=flowunit, flowunit=video_input, device=cpu, deviceid=0, source_url="/opt/modelbox/demo/video/car_test_video.mp4"]
videodemuxer[type=flowunit, flowunit=video_demuxer, device=cpu, deviceid=0]
videodecoder[type=flowunit, flowunit=video_decoder, device=cuda, deviceid=0, pix_fmt=bgr]
image_resize[type=flowunit, flowunit=resize, device=cpu, deviceid=0, image_width=512, image_height=288]
image_transpose[type=flowunit, flowunit=packed_planar_transpose, device=cpu, deviceid=0]
normalize[type=flowunit, flowunit=normalize, device=cpu, deviceid=0, standard_deviation_inverse="1,1,1"]
model_inference[type=flowunit, flowunit=car_detect, device=cuda, deviceid=0, batch_size=1]
yolox_post[type=flowunit, flowunit=yolox_post, device=cpu, deviceid=0]
videoencoder[type=flowunit, flowunit=video_encoder, device=cpu, deviceid=0, encoder=mpeg4, format=mp4, default_dest_url="/tmp/car_detection_result.mp4"]
video_input:out_video_url -> videodemuxer:in_video_url
videodemuxer:out_video_packet -> videodecoder:in_video_packet
videodecoder:out_video_frame -> image_resize:in_image
image_resize:out_image -> image_transpose:in_image
image_transpose:out_image -> normalize:in_data
normalize:out_data -> model_inference:input
model_inference:output -> yolox_post:in_feat
videodecoder:out_video_frame -> yolox_post:in_image
yolox_post:out_data -> videoencoder:in_video_frame
}"""
功能单元开发
开发者只需开发车辆检测推理功能单元(model_inference)、后处理(yolo_post)即可。
车辆检测推理功能单元
ModelBox已经适配了torch推理引擎,推理功能单元只需准备好模型和对应的配置文件即可。
[base] name = "car_detect" device = "cuda" version = "1.0.0" description = "car detection infer" entry = "./yolox_nano_jit_trace_288x512.pt" type = "inference" virtual_type = "torch" [input] [input.input1] name = "input" type = "float" [output] [output.output1] name = "output" type = "float"详细代码可参考
[project_root]/src/flowunit/car_detect/car_detect.toml。车辆检测后处理功能单元(yolo_post)
详细代码可参考
[project_root]/src/flowunit/yolox_post。