手势识别
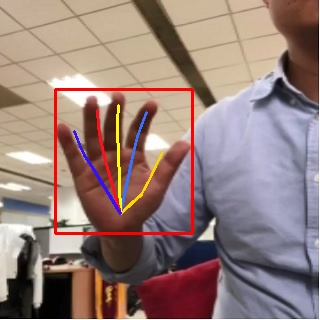
手势识别解决方案是ModelBox提供可直接调用的API,开发者集成手势识别solution后,可以完成手势关键点的识别。检测效果如下图所示:
输入
输入类型为ModelBox::Buffer,其中包含Data与Meta两种数据,具体要求如下:
Data:图片二进制数据
Meta:无要求
输出
输出类型为ModelBox::Buffer,其中包含Data与Meta两种数据,具体如下:
Data:检测后图片,若检测到手,则画出手的框与手指连线;若未检测到手,则为原图。
Meta:
- width:图片宽度。
- height:图片高度。
- channel:图片通道数。
- pix_fmt:图片格式。
- has_hand:值判断是否有检测到手,True为检测到有手,False为未检测到手。为True才会有bboxes与hand_pose参数。
- bboxes:检测到手的box坐标。
- hand_pose:检测到手指位置坐标,每只手5根手指,每根手指3个关键点坐标。
获取方法
可以通过下面两种方式获取:
安装包下载:进入下载链接,根据系统选择对应的版本进行下载到libtorchModelBox开发镜像中,直接安装后可调用相关接口可以运行。
源码编译:进入解决方案代码仓,克隆代码仓到libtorchModelBox开发镜像中,编译
hand_pose_detection解决方案并打包,具体命令如下:git clone https://github.com/modelbox-ai/modelbox-solutions.git cd modelbox-solutions mkdir build cd build cmake .. make package -j16 hand_pose_detection编译打包完成后,将在
release目录下生成对应的安装包,安装在镜像中即可。
使用样例
C++样例
头文件
需要引入如下头文件,并在编译时链接modelbox库:
#include <modelbox/flow.h> #include <opencv2/opencv.hpp>Solution创建初始化和启动
std::shared_ptr<modelbox::Flow> CreateHandPoseDetectionSolution() { ModelBoxLogger.GetLogger()->SetLogLevel(modelbox::LogLevel::LOG_INFO); auto flow = std::make_shared<modelbox::Flow>(); modelbox::Status mb_ret; mb_ret = flow->InitByName("hand_pose_detection"); if (mb_ret != modelbox::STATUS_OK) { MBLOG_ERROR << "flow init failed, ret " << ret.Errormsg(); return nullptr; } mb_ret = flow->StartRun(); if (mb_ret != modelbox::STATUS_OK) { MBLOG_ERROR << "flow start run failed, ret " << ret.Errormsg(); return nullptr; } return flow; }外部数据交互
待处理数据的输入,和处理完成后结果获取。
// 数据发送获取 modelbox::Status Process(std::shared_ptr<modelbox::Flow> flow, const std::string &test_file) { // 创建输入输出句柄 auto stream_io = flow->CreateStreamIO(); modelbox::Status mb_ret; // 创建输入 auto buffer = stream_io->CreateBuffer(); mb_ret = BuildInputData(test_file, buffer); if (mb_ret != modelbox::STATUS_OK) { MBLOG_ERROR << "flow build input data failed, ret " << ret.Errormsg(); return modelbox::STATUS_FAULT; } stream_io->Send("input", buffer); // 获取输出 std::shared_ptr<modelbox::Buffer> output_buffer; stream_io->Recv("output", output_buffer); mb_ret = ProcessOutputData(output_buffer); if (mb_ret != modelbox::STATUS_OK) { MBLOG_ERROR << "flow process output failed, ret " << ret.Errormsg(); return modelbox::STATUS_FAULT; } return modelbox::STATUS_OK; }- 创建输入
modelbox::Status BuildInputData(const std::string &img_path, std::shared_ptr<modelbox::Buffer> &input_buffer) { FILE *pImg = fopen(img_path.c_str(), "rb"); if (pImg == nullptr) { MBLOG_ERROR << "file open failed, file path: " << img_path; return modelbox::STATUS_FAULT; } fseek(pImg, 0, SEEK_END); auto fSize = ftell(pImg); rewind(pImg); input_buffer->Build((size_t)fSize); auto buffer_data = (char *)input_buffer->MutableData(); fread(buffer_data, fSize, 1, pImg); fclose(pImg); return modelbox::STATUS_OK; }- 处理输出
void ProcessOutputData(std::shared_ptr<modelbox::Buffer> &output_buffer) { bool has_hand; output_buffer->Get("has_hand", has_hand); MBLOG_INFO << "has hand: " << has_hand; int32_t width, height; output_buffer->Get("height", height); output_buffer->Get("width", width); cv::Mat image(height, width, CV_8UC3); memcpy_s(image.data, image.total() * image.elemSize(), output_buffer->ConstData(), output_buffer->GetBytes()); cv::imwrite("path_to_result.jpg", image); }资源释放
void FlowStop(std::shared_ptr<modelbox::Flow> flow) { // 结束执行 flow->Stop(); }
Python样例
需要引入的包
import modelbox import cv2 import numpy as np定义手势识别类
class HandPoseDetection: ## 初始化,设置日志级别 def __init__(self, log_level=modelbox.Log.Level.INFO): self.log = modelbox.Log() self.log.set_log_level(log_level) ## 初始化手势识别Solution def Init(self): self.flow = modelbox.Flow() ret = self.flow.init_by_name("hand_pose_detection") if ret == False: modelbox.error(ret) return ret ret = self.flow.start_run() if ret == False: modelbox.error(ret) return ret ## 设置输入图片路径,输出结果保存路径,返回是否检测到手 def Process(self, input_file, output_path): stream_io = self.flow.create_stream_io() file = open(input_file, "rb") input_buffer = stream_io.create_buffer(file.read()) file.close() stream_io.send("input", input_buffer) stream_io.close_input() result = stream_io.recv("output") has_hand = result.get("has_hand") msg = "has hand: " + str(has_hand) modelbox.info("has hand: ", msg) if has_hand: width = result.get("width") height = result.get("height") channel = result.get("channel") out_img = np.array(result.as_object(), dtype=np.uint8) out_img = out_img.reshape(height, width, channel) cv2.imwrite(output_path, out_img) return has_hand主函数
if __name__ == '__main__': hand_pose = HandPoseDetection() hand_pose.Init() hand_pose.Process(input_image_path, output_image_path)